reactive-slip-control
Reactive Slip Control in Multifingered Grasping
Hybrid Tactile Sensing and Internal-Force Optimization
Paper accepted for ICRA 2026
https://arxiv.org/abs/2602.16127
Robotic manipulation in unstructured environments requires stable grasps without excessive force. Humans solve this by sensing incipient slip and modulating grip forces rapidly. This project investigates learning-based slip detection integrated into an interpretable, model-based grasp stabilization loop, enabling fast reactions and robust behavior in multi-fingered grasps.
keywords : grasp stability, internal forces, slip detection, multifingered gripper
Context project
Learn more on my PhD page
(setup, sensors, demos)
CONTRIBUTION
Closed-loop grasp adjustment
Stabilize multi-fingered grasp without explicit friction models, under unknown perturbations.
- Closed-loop adaptation of grasp forces without explicit friction models
- Stabilize multi-finger grasps by injecting internal forces
- Tactile feedback loop leveraging slip detection for short reaction time
Problem: force coordination in multi-finger grasps
In parallel-jaw grippers, preventing slip is often handled by a simple scalar increase of grip force. In multi-finger grasps, the same strategy can inject an undesired net wrench and destabilize the object. We target slip-aware force coordination: increase stability while preserving the object-level wrench.
|
|
|
Simple gripper
|
Multi-digit gripper
|
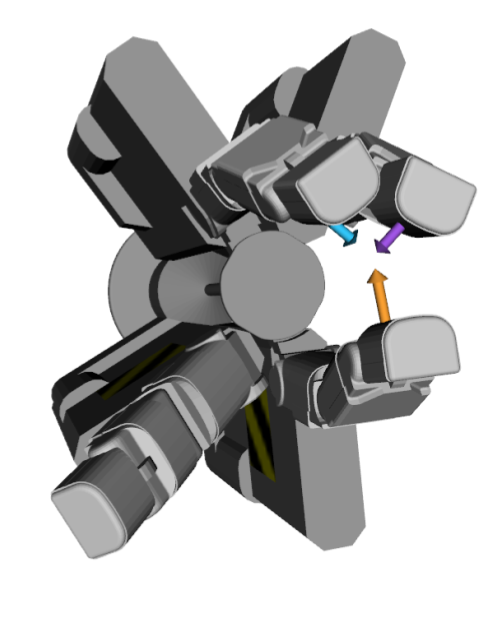
Why internal forces matter
| Uniform forces → Failure | Internal force coordination → Stable grasp |
| $$ \|\mathbf{f}_1\| = \|\mathbf{f}_2\| = \|\mathbf{f}_3\| $$ Uniform force magnitudes ignore grasp geometry and lead to slip. | Internal forces injected in the null-space of the grasp matrix $\mathcal{N}(G)$ redistribute contact forces without disturbing object equilibrium. |
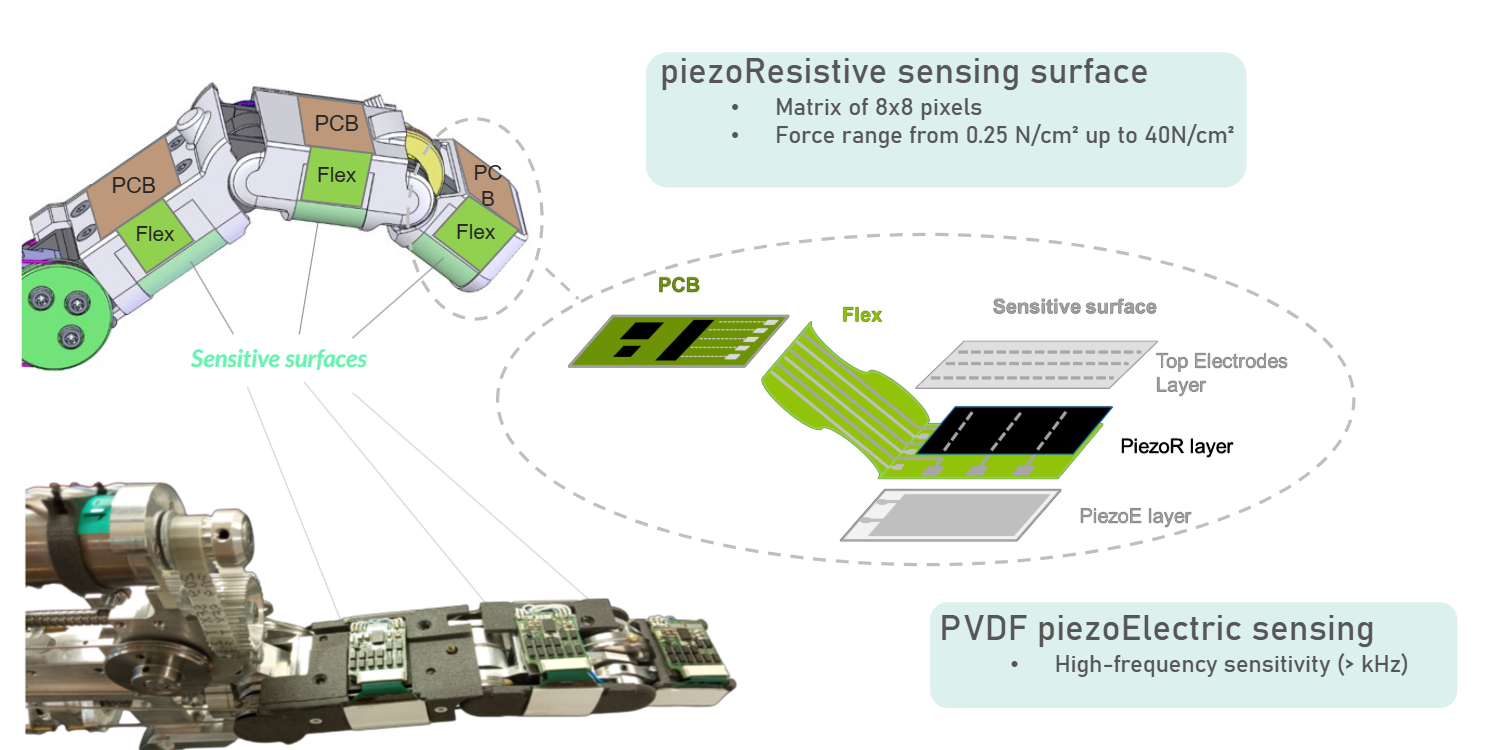
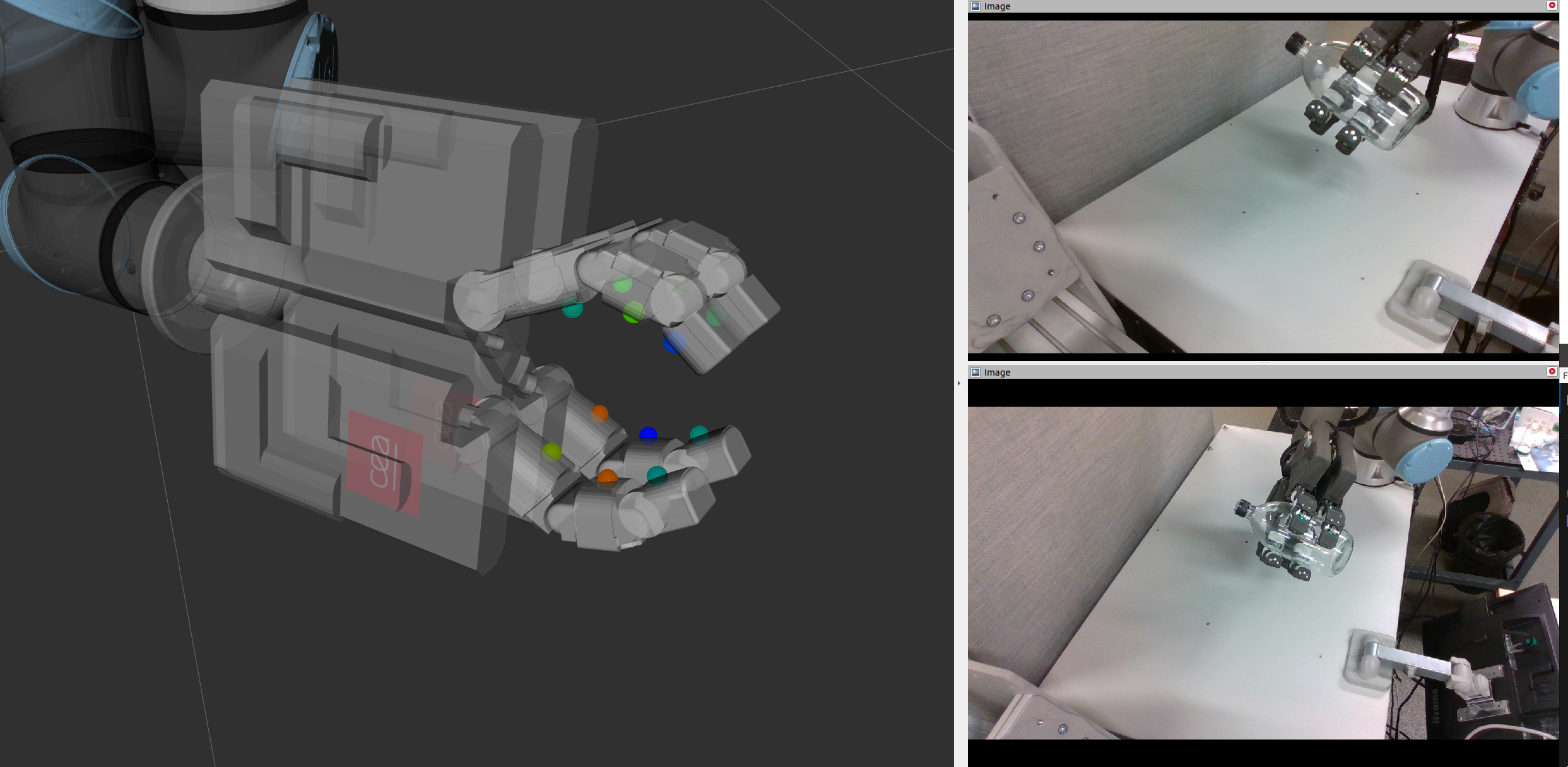
Tactile fingers - hybrid (PzE + PzR)
Method Overview
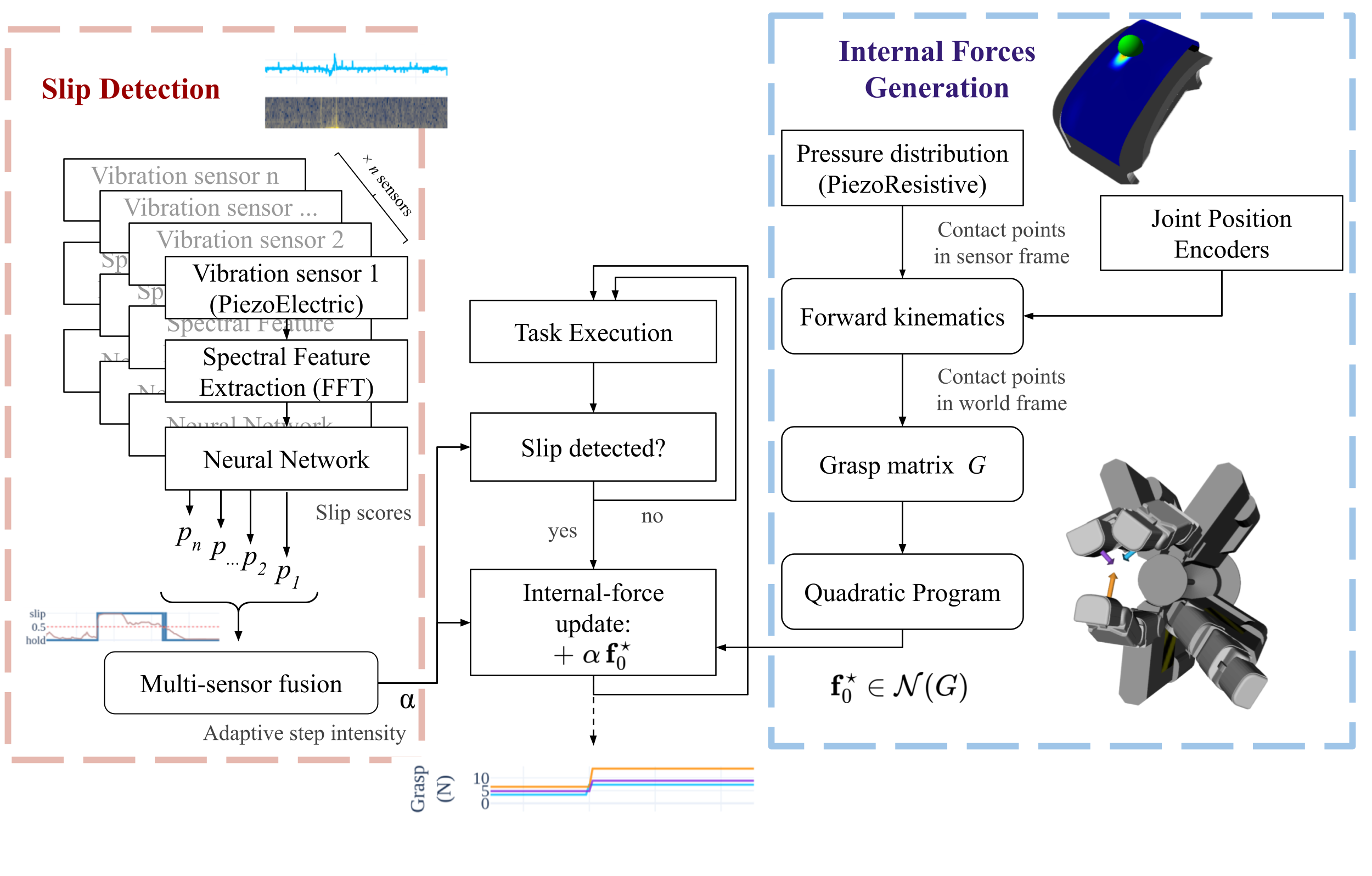
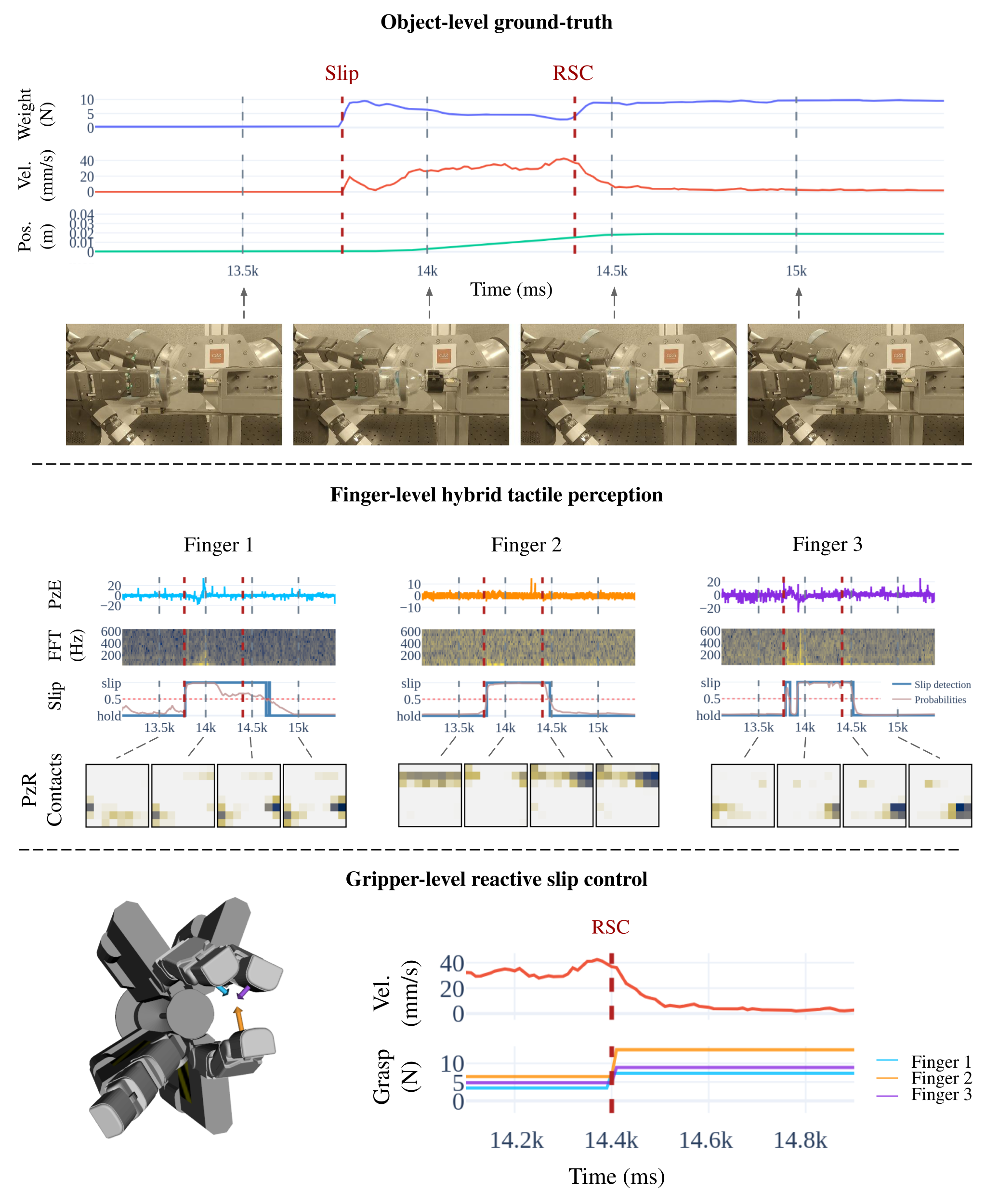
We use a hybrid learning + model-based approach, with two pipelines in parallel and coupled through an event-triggered feedback loop:
- Learned slip perception from high-bandwidth tactile cues (FFT + GRU)
- Online grasp model update from contact localization
- Event-triggered internal-force optimization to stabilize the grasp without disturbing the object wrench
Slip perception (PzE): training benches and signals
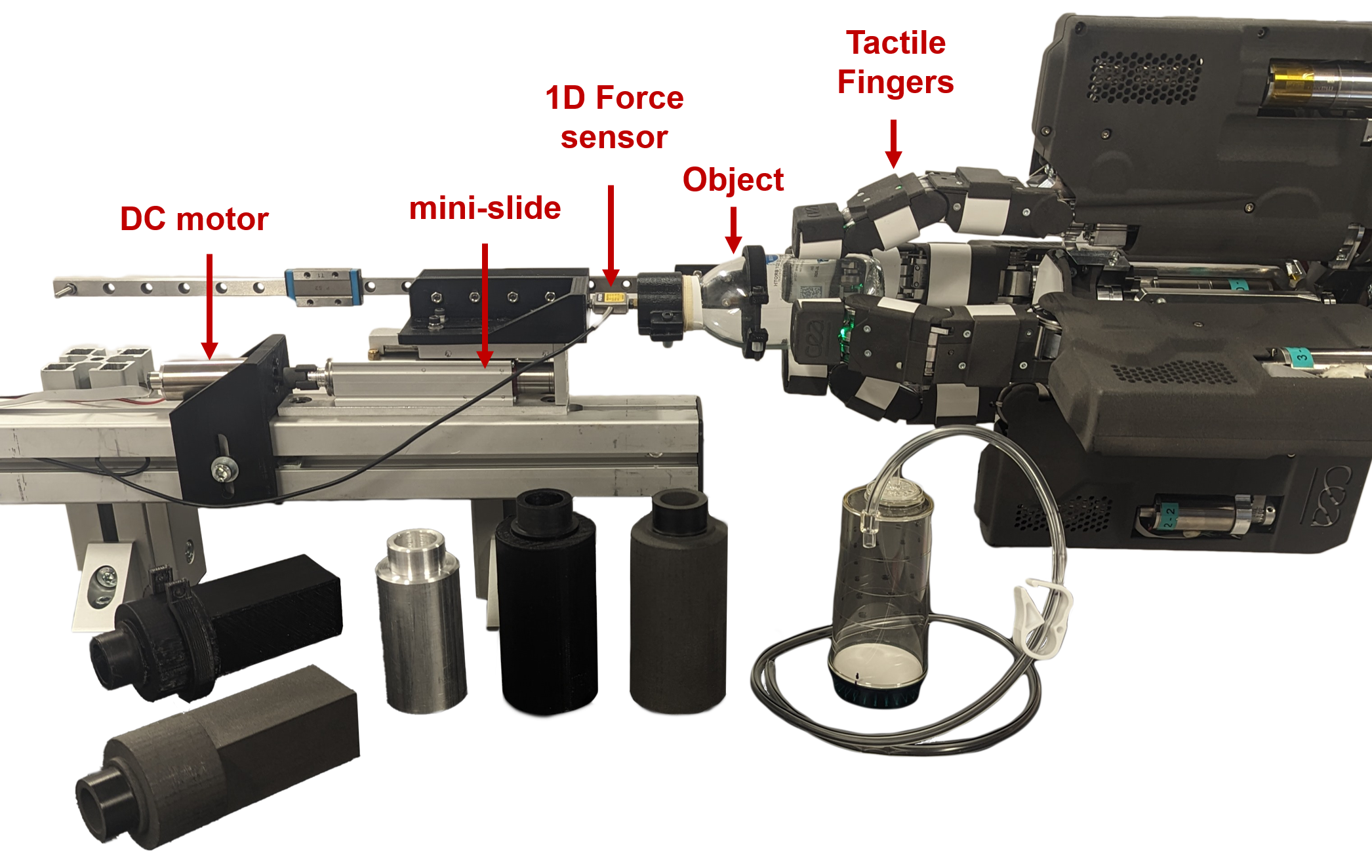
|
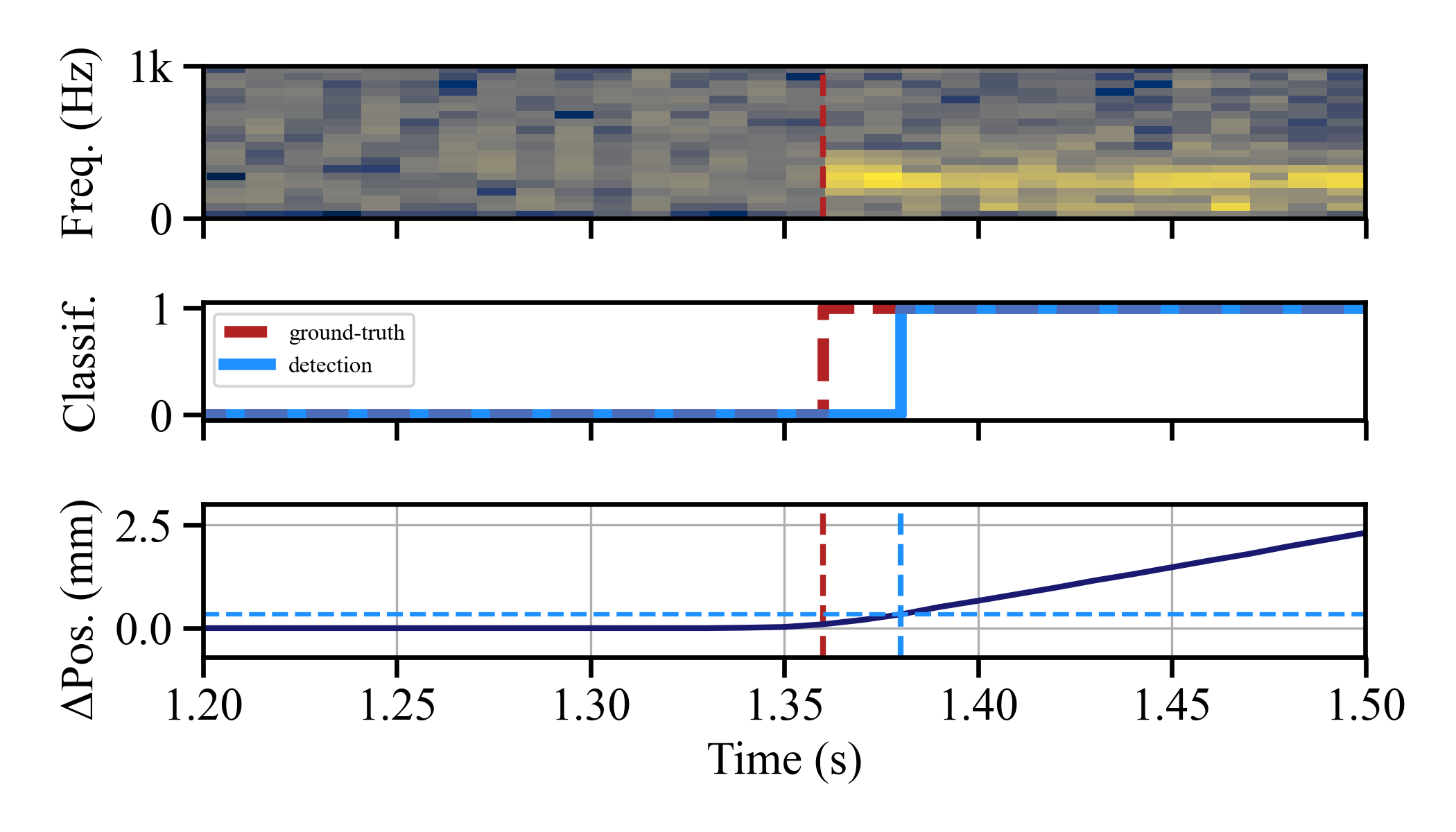
|
Slip detection module The controller relies on a learning-based slip detector trained on dedicated benches. Data collection, perturbation modeling, and training are detailed on the project page. → Learn more about tactile slip detection |
Grasp geometry (PzR): contact point estimation
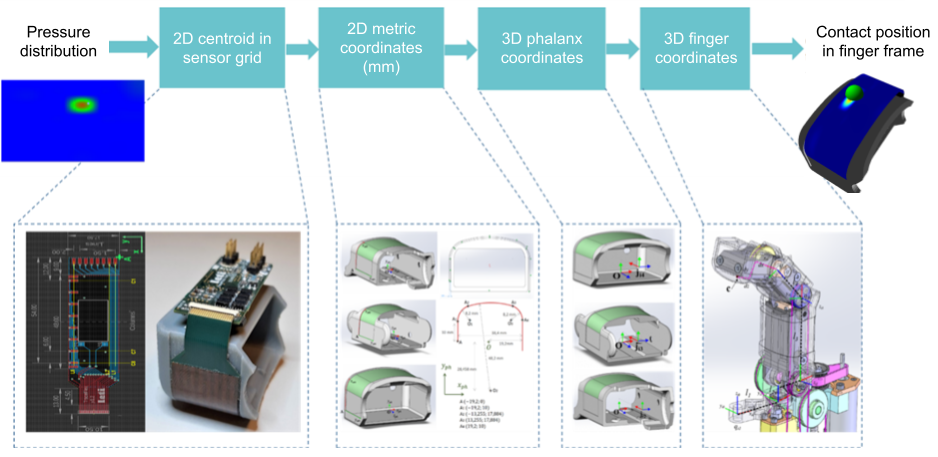
|
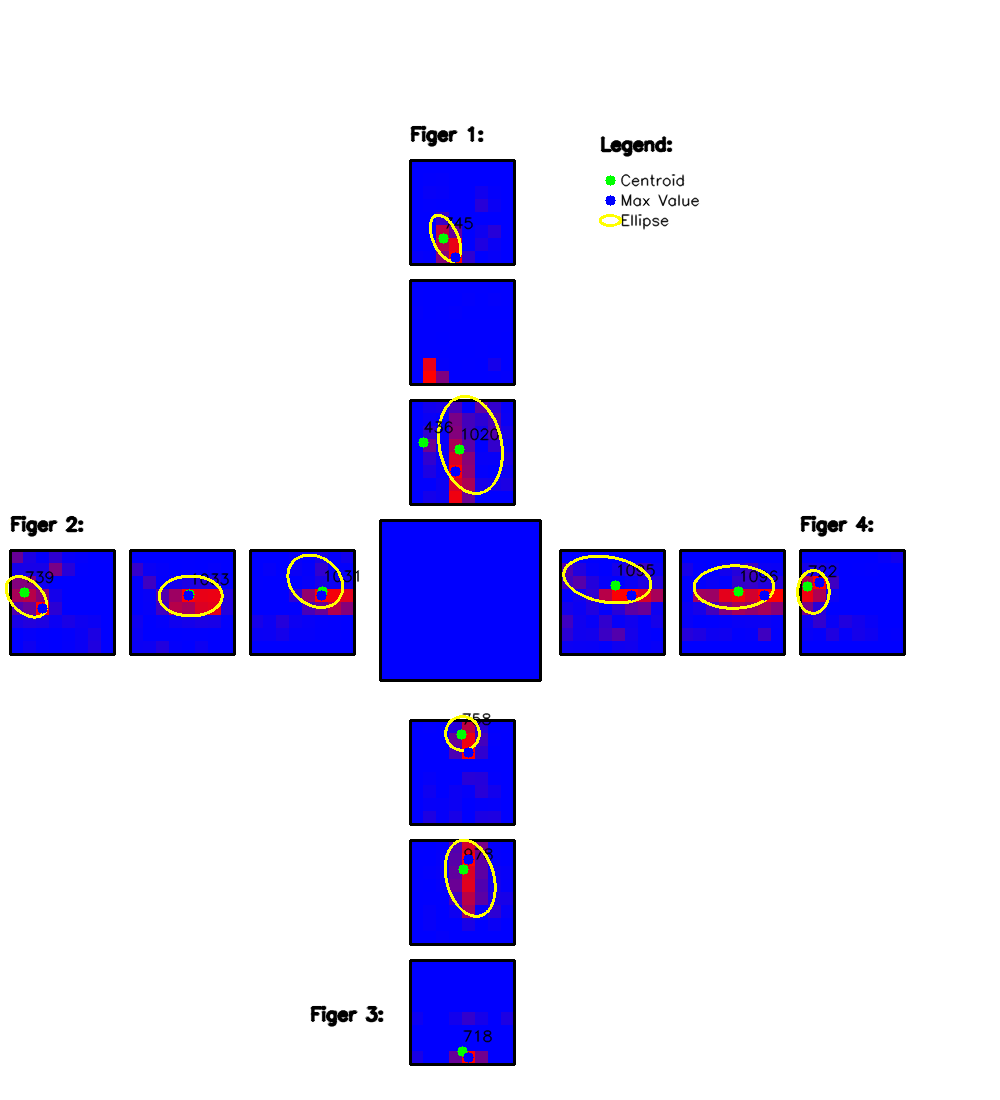
|
Experimental validation
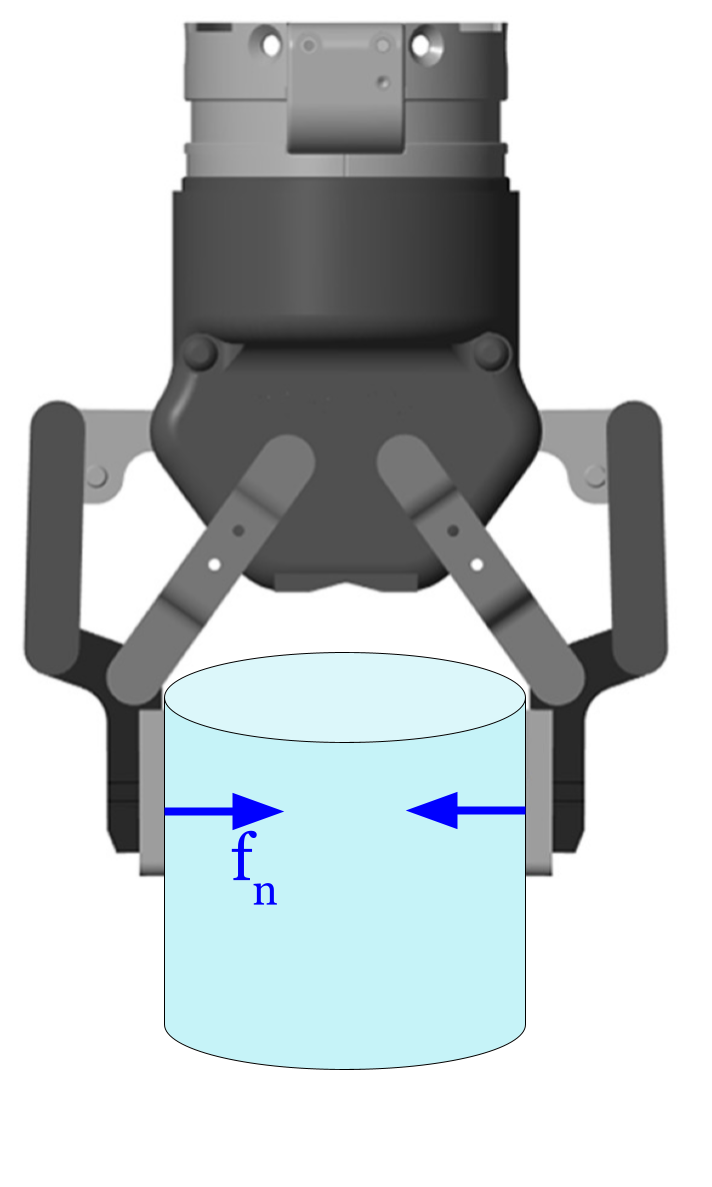
Asymmetric 3-finger grasp on a cylinder (planar)
- Internal force coordination in null space of the grasp
- RSC triggers after ~130 ms
- ~19 mm object travel before stop
Reactive Slip Control in action
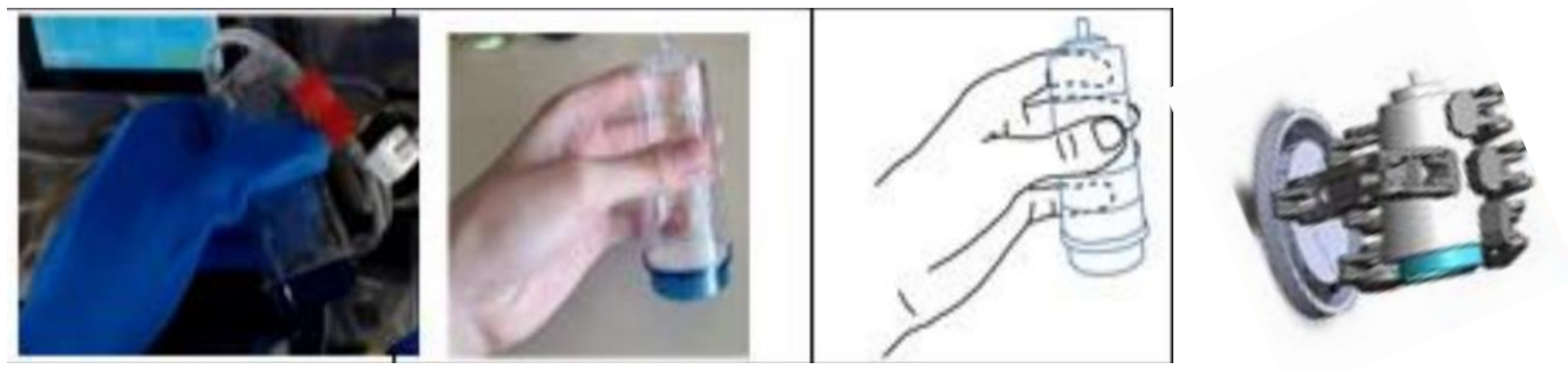
“peg-out” canister extraction
| Baseline → Failure (insufficient grasp force) | RSC → Success (slip-triggered force increase) |
| Object remains docked despite lifting motion. | Slip detected early → grasp effort increases → extraction succeeds. |
Latency
Real-time loop & latency budget - theoretical compute
(optimized in-loop compute budget excluding I/O-heavy prototype constraints).
| Block | Estimate |
|---|---|
| FFT (C impl., 20 ms window) | < 0.1 ms compute (windowing delay ~13 ms) |
| GRU inference (Python/ONNX) | ~3 ms (model decision delay ~24 ms) |
| PzR → contact + 𝒩(G) update | ~5 ms |
| QP solve (OSQP) for internal-force update | ~4 ms |
| Net slip-reaction latency (target) | ~35–40 ms |
Paper accepted at ICRA 2026 Reactive Slip Control in Multifingered Grasping: Hybrid Tactile Sensing and Internal-Force Optimization
Théo Ayral, Saifeddine Aloui, Mathieu Grossard
Contact
Théo AYRAL
➡️ This work is part of the PhD thesis
Learning-based slip detection for adaptive grasp control
CEA (Leti & List) · Université Paris-Saclay
https://thayral.github.io/PhD-manipulation/